Robotic Platform for Autonomous Surgery
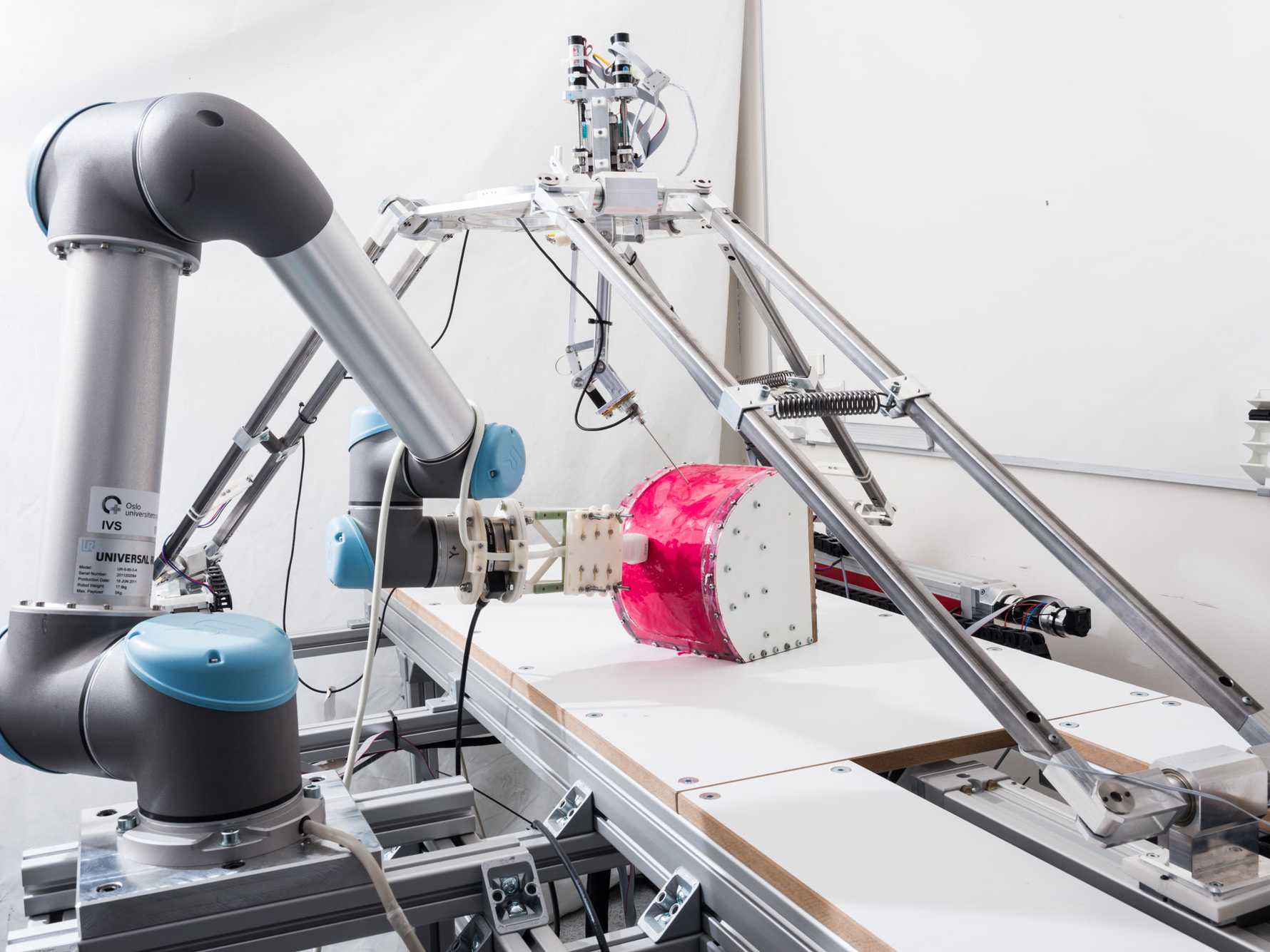
A robotic platform was developed as part of the European project I-SUR (Intelligent Surgical Robot), with the aim of performing simple surgical tasks automatically. The developed I-SUR robot has a modular structure with up to 18 actuated degrees of freedom allowing for the execution of precise needle insertion and suturing.

Robots are increasingly used to assist surgeons during interventions, providing valuable advantages in terms of precision and decreased tissue damage. While most of the existing surgical robots are teleoperated by a surgeon, recent developments have focused on increasing the level of autonomy of surgical robots in order to achieve simple surgical actions.
Within the framework of the external pageI-SUR European Project, we have developed a modular surgical robotic platform with up to 18 actuated degrees-of-freedom (DOF) with the aim of achieving puncturing and suturing in an autonomous way. The I-SUR robotic platform is based on a macro-micro robotic approach, where a two-arm micro-unit with hybrid kinematics (with up to 14 DOF) is mounted at the end-effector of a larger macro-unit implemented as a linear delta robot (4 DOF). The macro-unit functions as a gross positioning manipulator, while the micro-unit is a more dexterous and versatile unit mimicking the arms of a surgeon, where tools, such as a needle or a gripper can be mounted.
The robotic platform was validated in the context of a puncturing task, where a needle was autonomously inserted into an abdominal surgical phantom under ultrasound guidance (Muradore et al. 2015).
Collaborators
external page Prof. Paolo Fiorini

Funding
- European Union Seventh Framework Programme (FP7/2007-2013) under grant agreement no 270396 (I-SUR)