Past Research Projects
The Rehabilitation Engineering Laboratory and its collaborators have contributed to the following reserach areas/projects:
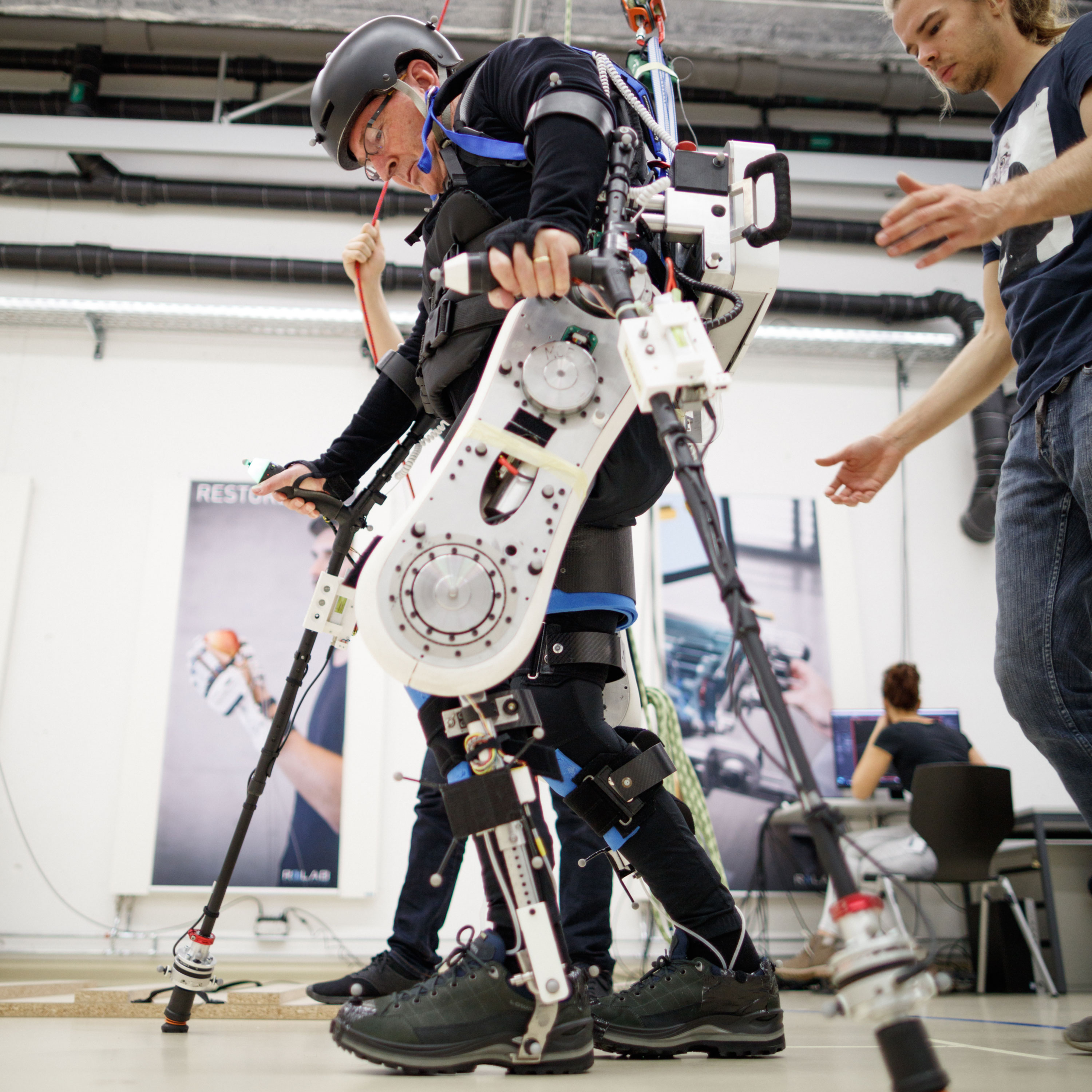
Exoskeleton with Variable Impedance Actuation for Paraplegics Robotic systems to restore the ability of walking have been emerging in the recent past. However, unlike human legs they are typically not able to adjust their impedance to the terrain and the task, which makes them more susceptible for falls and mechanical damage to the structure. The VariLeg exoskeleton is the first exoskeleton with a variable stiffness actuation designed to support the full weight of a user. It has been developed in the course of a Focus Project, successfully participated in the Cybathlon 2016 and will now be used to investigate potential benefits of variable impedance actuation in assistive devices such as exoskeletons.
Dynamic Estimation of Human Knee Joint Impedance during Gait We are investigating how healthy humans control the mechanical impedance of the knee joint during gait. We developed a powered exoskeleton to apply brief position perturbations at specific points in the gait cycle, while measuring the interaction torque. The gained knowledge can be used for the design and control of robotic prostheses and orthoses.

WHEELIE – a Force-Augmenting Self-Stabilizing Wheelchair to Overcome Daily Life Obstacles
The powered wheelchair race at the CYBATHLON 2016 demonstrated the impressive range of obstacles that state-of-the-art powered wheelchairs can overcome. However, this capability came at a cost: many of the presented designs were bulky and not adapted to everyday use. At the same time, Heinz Frei, a highly successful wheelchair athlete, was able to independently complete all of the CYBATHLON obstacles, with the exception of stair ascent, with his conventional, manual wheelchair.

Neural Self-Manipulation of Food Reward by means of Real-Time fMRI Neurofeedback
Certain foods are more rewarding than others. The mesolimbic dopaminergic pathway in the brain induces incentive motivation to acquire rewards. Training humans to down-regulate their brain response to visually presented appetizing food stimuli in a real-time fMRI neurofeedback paradigm could help reduce the relative reinforcing value of the stimuli.

WearableSensor-Based Self-Directed Home Therapy ArmeoSenso (research version) is a sensor-based home therapy system for self-directed neurorehabilitation of the upper extremity.

Robotic Platform for Autonomous Surgery
A robotic platform was developed with the aim of performing simple surgical tasks automatically. The I-SUR (Intelligent Surgical Robot) robot has a modular structure allowing for the execution of precise needle insertion and suturing.

Neuroscience Robotics
The integration of non-invasive neuroimaging and high-performance robotics provides a powerful tool to investigate human sensorimotor control and related dysfunctions under well-controlled and reproducible conditions.

Functional Imaging and Robotics for Sensorimotor Transformation
Using robotics and resting state functional magnetic resonance imaging, we aim to gain a better understanding of the neural mechanisms involved in using touch for dexterous control of the hand.
eyeCane – Advanced Augmented White Cane with Obstacle Height and Distance Feedback
In a joint project, the "Zugang für alle" foundation, the Zurich University of the Arts, MESA Imaging AG and the Rehabilitation Engineering Lab have developed an electronic mobility aid for the blind and visually impaired, which now aims to overcome these weaknesses. The "seeing blind cane" uses a 3D camera to capture the surroundings and their obstacles and transmits the information to the affected person's fingers by means of vibration patterns.