Robotic Somatosensory Assessment of Hand Function
Somatosensory deficits following neurological injury such as stroke are poorly investigated and rarely addressed during rehabilitation, despite the importance of somatosensory input in motor learning and control. This can be at least partially explained by the lack of quantiative and sensitive assessment tools. Our aim is to develop quantitative and sensitive assessment tools based on robotics technology, allowing to diagnose and monitor somatosensory deficits, compare different therapies and develop assessment-driven somatosensory therapy for a more effective and complete recovery.

Current rehabilitation strategies after stroke focus mostly on motor training, and neglect the importance of somatosensory feedback in motor learning and execution. However, for the hand to be used in activities of daily living, fine motor control and discriminative sensation are crucial. The aim of this project is to develop and clinically evaluate a Robotic Sensory Trainer for diagnosis, assessment and therapy of somatosensory impariments of the hand. The envisioned device should help patients train and improve their stereognosis and tactile/proprioceptive discrimination, by applying repeatable and well-controlled sensory stimuli of varying type, location, intensity and duration to the fingers and palm of the hand.
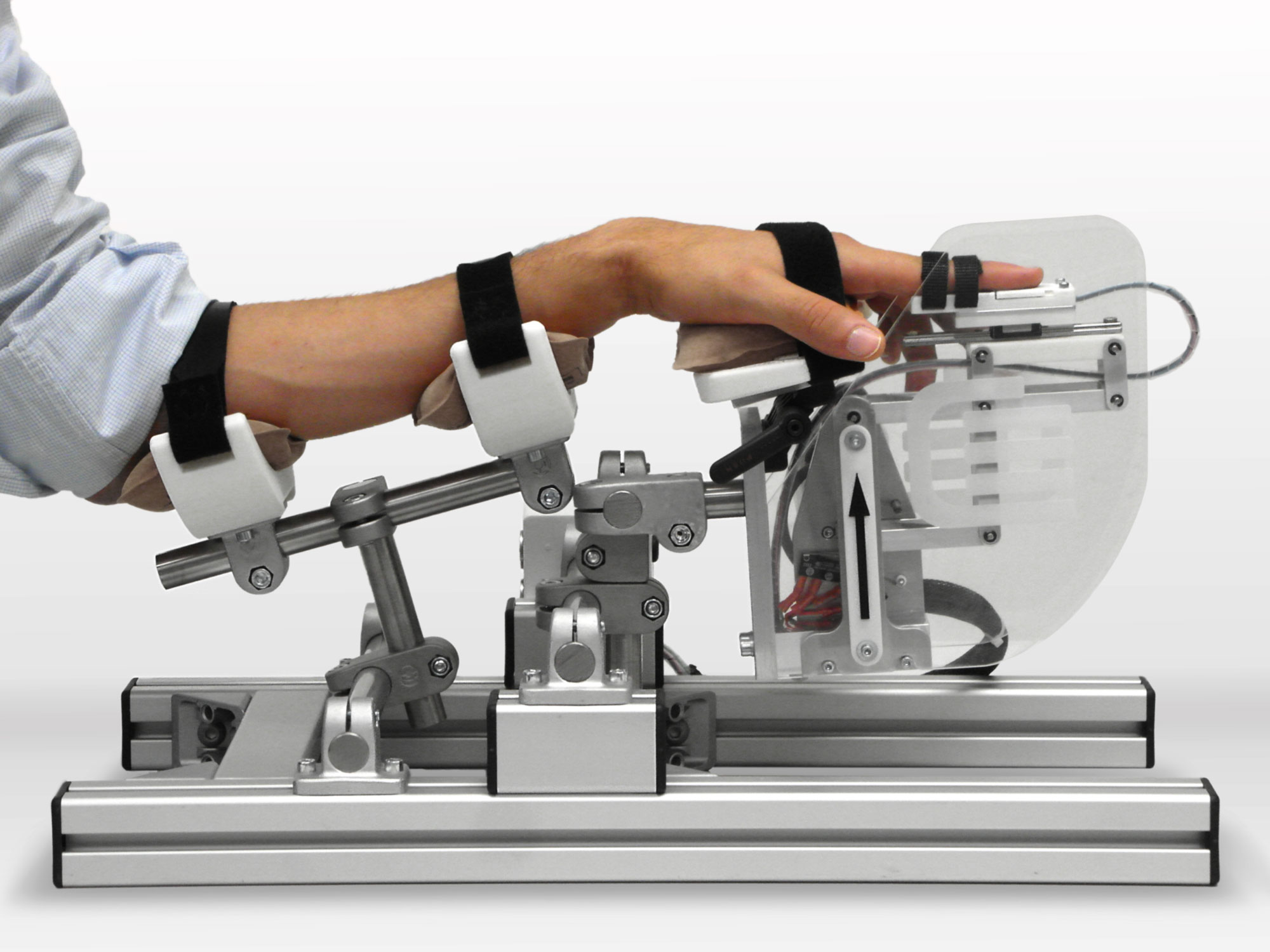
We developed a first prototype of the Robotic Sensory Trainer. This device can render three types of sensory stimuli on the palm and index finger, namely vibration, displacement (extension/flexion of fingertip) and pressure, and measure the interaction force with the finger. Vibration stimuli can be applied to the fingertip, proximal phalange and proximal area of the palm by using four vibration motors. Flexion/extension at the metacarpophalangeal (MCP) joint of the index finger is controlled via a parallel remote-center-of-motion mechanism, which places the virtual center of rotation inside the MCP joint, and allows for a biomechanically correct movement. Pressure is applied by inflating a latex membrane placed over the tip of the index finger, controlled by a pressure regulator. The pressure applied by the membrane is continuously measured through a force sensor placed below the index finger. This force sensor can also measure the interaction force between the finger and the displacement module. To allow patients to provide feedback on the perceived stimuli during psychophysical testing, we integrated a touch screen placed over the Robotic Sensory Trainer.
We are currently using this prototype to determine sensory thresholds in healthy and stroke subjects. Assessment and training protocols will be designed, implemented and evaluated.
Robotic Somatosensory Assessment Gallery






Funding
- Swiss National Science Foundation, project 320030L_170163
- ETH Zurich
- Janggen-Pöhn Foundation