Medical Engineering I/II
Medical engineering I/II is a project based course introducing ETH medical students to engineering principles. It is framed around the use case of an assistive elbow exoskeleton for persons with spinal cord injury.
Medical Engineering I
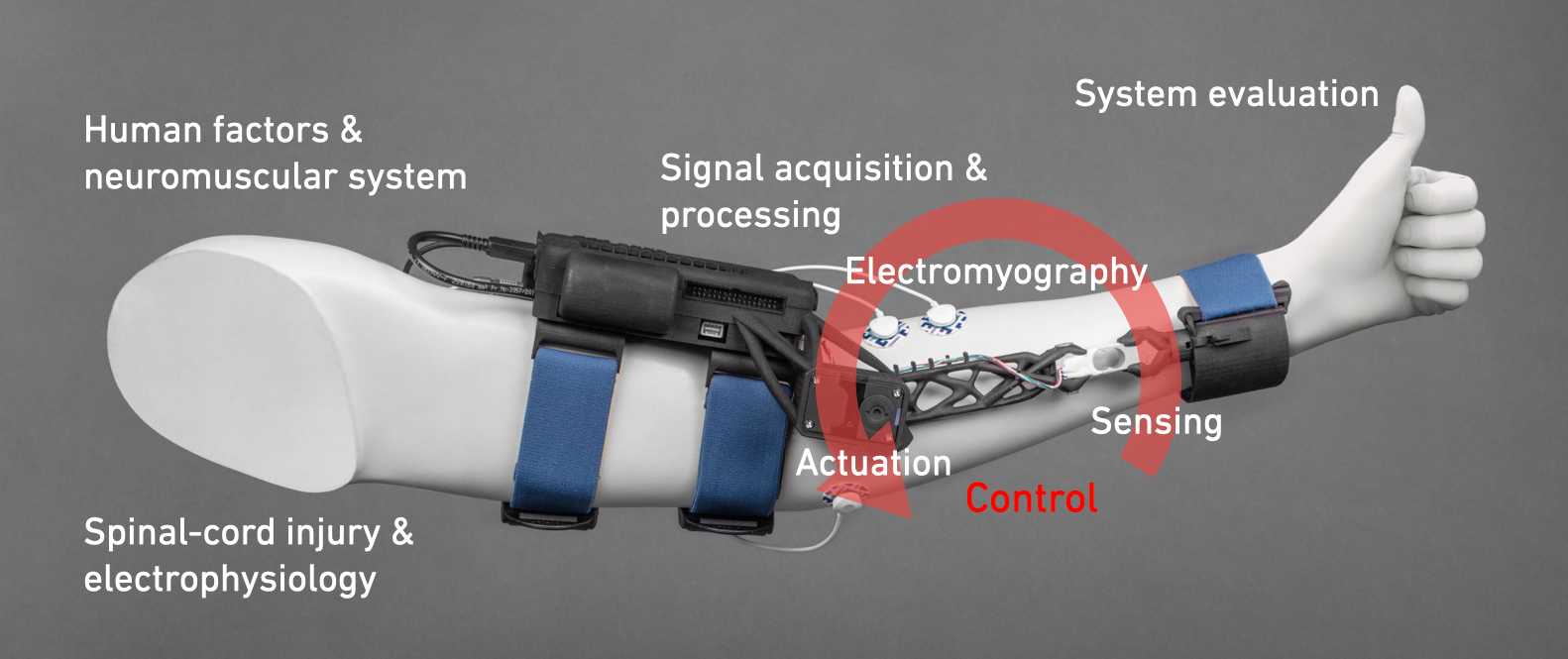
This course introduces medical students to engineering and product development fundamentals as well as practical skills, ranging from human factors to sensing and actuation, signal processing, control and user evaluation. The course is framed around an assistive elbow exoskeleton, which students receive for the duration of the semester, and work on in groups of 3–4. The course consists of 12 modules consisting of two hours of lecture followed by two hours of practical work.
Medical Engineering II
The Medical Engineering II (Medizintechnik II) block course is a one-week hackathon promoting project-based learning via an intense hands-on project at the interplay between medicine and engineering. It is carried out in the form of a 5-day design sprint in which students conceptualize and develop an assistive technology in the form of a gripper module for an elbow exoskeleton. They then implement means to control the gripper and compete in a challenge inspired by the CYBATHLON, in which daily life tasks must be carried out using the developed assistive technology.
Prerequisites
LE 377-0523-00L Medical Technology I


Lecture Material
All material related to lectures (slides, readings), practical sessions (exercises, training videos and LabVIEW code) and the hackathon is made available on Moodle.